Reinforcement Learning with Q tables
What is reinforcement learning
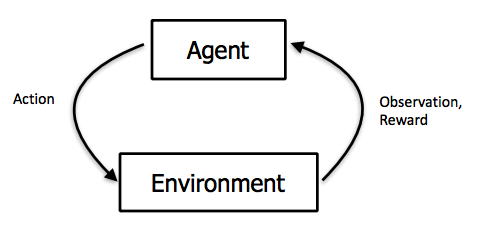
Reinforcement learning is an area of machine learning dealing with delayed reward.
What does this means? Well, simple, let me explain this with an example. For this I am assuming you have heard (better if you know) about neural networks or even a basic knowledge of regression or classification will do. So lets take an example of classification problem, you have been given a large chunk of images of dogs, and you have to design a system which will be able distinguish between an image by saying if it is of dog’s or not. Anyone with a little knowledge of machine learning will advice you to use convolution neural network and train with the provided images, and yeah it will work. But how? Well, without going into details (maybe an article on this later?!) you train the neural network on sample images first. While training the neural network learns the little features and pattern unique to dog’s image. During training you know the expected output, it is a dog images, so whenever the network predicts wrong we correct it. In a way, we know the reward for the provided images, if the prediction is right, we give positive rewards, if prediction is wrong, the reward is negative and corrective measures are taken to learn and adapt. So we know the immediate rewards.
But what if we don’t know the immediate rewards? Here, reinforcement learning comes into the picture.
To explain this, lets create a game. The game is simple, there are 10 tiles in a row. All tiles are not equal, some have hole where we do not want to go, whereas some have beer, where we definitely want to go. When the game start, you can spawn on any of tiles, and can either go left or right. The game will go on unless either we have won or its game over, lets call each such iteration an episode.

Let’s take one simple episode as example. Ok lets say we spawn on tile 2. Now suppose I haven’t shown you the game map and you only have the option of going left or right, which way will you go? Well you can’t say unless you try it out. Let’s say you keep on going left, till you are in tile 0, the tile with hole and you lose. This is not what we want to happen, so lets assign a negative reward to our action of going left from 2 to 1 to 0. In next episode by some chance you spawn in tile 2 again, this time you keep on going right, until you reach tile 6. Here we got the beer, lets assign the actions with positive reward.
What we learned? for every step we take, until we hit the hole or beer, we don’t know of the rewards. Delayed rewards guys. There is no one who tells you the right direction, after every step there is no reward, suggesting its the right or wrong direction. Now its even difficult for us to grasp the sense of right actions, what if we want the computer to learn this? Reinforcement learning to the rescue.
Markov Decision Process
Now what is this Markov process and why do we need to learn it? Well I thought the same and to be clear, we don’t need to deep dive into it, just a basic intuition would do.
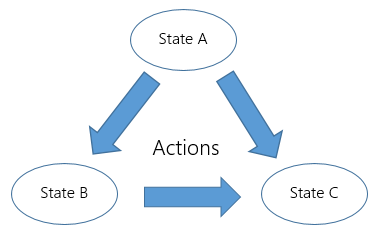
So, markov decision process is used for modeling decision making in situations where the outcomes are partly random and partly under the control of a decision maker. In a nutshell, all the tiles, left & right actions, the negative & positive reward we discussed can be modeled by markov process.
A markov decision process consist of,
- State (S): It is a set of states. Tiles in our example. So we have 10 states in our game.
- Action (A): It is a set of actions available form state s. Left & right from our game.
- Probability of transition:
P(s'|s, a)It is the probability of transition tos'state at timet+1if we took actionain statesat timet. We were kinda sorted on this front, a left from tile 3 leads to tile 2, no question asked. - Reward:
R(s'|s, a)It is the reward we receive if we transition from statesto states'by taking actiona. - Discount (Y): It is the discount factor, which represents the difference in future and present rewards.
As simple as that! So markov process can be understood as a collection of states S with some actions A possible from every state with some probability P. Each such action will lead to some reward R. If the probability and rewards are unknown, the problem is of reinforcement learning. Here we are going to solve a simple such problem using Q Learning or better the most basic implementation of it, the Q table.
Q learning
Now taking all the above learned theory in consideration, we want to build an agent to traverse our game of beer and holes (looking for better name) like a human would. For this, we should have a policy which tells us what to do and when. Think of it as a revealed map of the game. Better the policy, better our chances of winning the game, hence the name Q (quality) learning. The quality of our policy will improve upon training and will keep on improving. To learn, we are going to use the bellman equation, which goes as follows,

where,
Q(s,a)is the current policy of action a from state sris the reward for the actionmax(Q(s',a'))defines the maximum future reward. Say we took actionaat state s to reach states'. From here we may have multiple actions, each corresponding to some rewards. The maximum of that reward is computed.Yis the discount factor. Now the value varies from 0 to 1, if value is near 0 immediate reward is given preference and if value goes near 1, importance of future rewards increase until at 1 it is considered equal to immediate rewards.
Here, we are trying to formulate the delayed rewards into immediate rewards. For every action we take from a state, we update our policy table, lets call it Q table, to include a positive or negative reward. Say, we are in tile 4, and we are going to take a right, making tile 5 the next state, the immediate reward of tile 4 will include some factor (determined by discount) of the maximum reward of all the action possible from tile 5. And if you consult the game map, a right from tile 5 leads to tile 6 which is the ultimate goal in our game, so a right action from tile 4 is also assigned some positive reward.
Code
Ok too much theory for now, let code.
Let me define the states, actions and rewards as matrix. One way of doing it is having rows for all the state and columns for actions, so as we have 10 state and 2 actions, we will define a 10x2 matrix. For simplicity I am not using any library, just coding them with lists in python.
environment_matrix = [[None, 0],
[-100, 0],
[0, 0],
[0, 0],
[0, 0],
[0, 100],
[0, 0],
[100, 0],
[0, 0],
[0, None]]
As you can see, taking right from tile 5 and taking left from tile 7 have high reward of 100 as it leads to tile 6. Also a left from tile 1 leads to hole, so it has a negative reward. Tile 0 and 9 have left and right reward as None as there are no -1 or 10th tile.
Now its time for our magic Q table, which will update as the agent learns on each episode.
q_matrix = [[0, 0],
[0, 0],
[0, 0],
[0, 0],
[0, 0],
[0, 0],
[0, 0],
[0, 0],
[0, 0],
[0, 0]]
For starters lets assign all to zero.
Defining some function which helps in game traversal.
win_loss_states = [0,6]
def getAllPossibleNextAction(cur_pos):
step_matrix = [x != None for x in environment_matrix[cur_pos]]
action = []
if(step_matrix[0]):
action.append(0)
if(step_matrix[1]):
action.append(1)
return(action)
def isGoalStateReached(cur_pos):
return (cur_pos in [6])
def getNextState(cur_pos, action):
if (action == 0):
return cur_pos - 1
else:
return cur_pos + 1
def isGameOver(cur_pos):
return cur_pos in win_loss_states
getAllPossibleNextActionpass your current state and it will return all the possible actions. Note for tile 0, only right action is there and same goes for tile 9 with only left actionisGoalStateReachedif the current tile is 6 it will return TruegetNextStatepass current state and the action, and it will return the next stateisGameOverif the state is 0 or 6, the game is over, this returns True
Now comes the traning part,
discount = 0.9
learning_rate = 0.1
for _ in range(1000):
# get starting place
cur_pos = random.choice([0,1,2,3,4,5,6,7,8,9])
# while goal state is not reached
while(not isGameOver(cur_pos)):
# get all possible next states from cur_step
possible_actions = getAllPossibleNextAction(cur_pos)
# select any one action randomly
action = random.choice(possible_actions)
# find the next state corresponding to the action selected
next_state = getNextState(cur_pos, action)
# update the q_matrix
q_matrix[cur_pos][action] = q_matrix[cur_pos][action] + learning_rate * (environment_matrix[cur_pos][action] +
discount * max(q_matrix[next_state]) - q_matrix[cur_pos][action])
# go to next state
cur_pos = next_state
# print status
print("Episode ", _ , " done")
print(q_matrix)
print("Training done...")
Let me clarify,
- First we defined the discount factor and learning rate
- We are going to train for 1000 episodes
- Spawning is completely random, it could be any of the tiles
- While the episode is not over, we keep on taking random actions and updating the Q table
After 1000 episodes, Q table some what looks like this,
[[0, 0], [-99.99999999730835, 65.60999997057485], [59.04899994359059, 72.8999999993016], [65.60999999858613, 80.99999999978154],
[72.89999999929572, 89.99999999991468], [80.99999999863587, 99.99999999997391], [0, 0], [99.9999999999985, 80.99999999994624],
[89.99999999999515, 72.89999999997386], [80.99999999999046, 0]]
Let’s beautify this a lil bit, here we go,
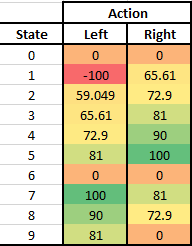
Now what does our policy says, if you find yourself at any of the state, choose the action with higher value (here darker shade of green) and you will reach the tile with beer. Not bad, right!
Next Step
What if we increased the complexity of our game by having 2D boards with multiple holes, well that would be an interesting thing to do.
Note: This note is from my personal website.